
Šaltinis: OpenAI DALL·E 2 su raginimu „Hiperrealistinis roboto, skaitančio žinias nešiojamuoju kompiuteriu kavinėje, vaizdas“
Sveiki atvykę į trečiąjį Robo-Insight leidimą, kas du kartus per savaitę pateikiamą robotikos naujienų atnaujinimą! Šiame įraše džiaugiamės galėdami pasidalinti daugybe naujų pasiekimų šioje srityje ir pabrėžti pažangą tokiose srityse kaip judėjimas, nepažįstama navigacija, dinaminis valdymas, kasimas, žemės ūkis, chirurgija ir maisto rūšiavimas.
Biologiškai įkvėptas robotas valdo 8 judesio režimus prisitaikančiam manevravimui
Nuolatinio judėjimo pasaulyje naujai sukurtas robotas, pavadintas M4 (Multi-Modal Mobility Morphobot), pademonstravo gebėjimą perjungti aštuonis skirtingus judėjimo režimus, įskaitant riedėjimą, skrydį ir ėjimą. Sukurtas mokslininkų iš Caltech autonominių sistemų ir technologijų centro (CAST) ir Šiaurės rytų universiteto, robotas gali savarankiškai pritaikyti savo judėjimo strategiją pagal aplinką. Inžinierių Mory Gharib ir Alireza Ramezani sukurtas M4 projektas siekia pagerinti roboto judėjimą, naudojant pritaikomų komponentų ir dirbtinio intelekto derinį. Galimos šios naujovės taikymo galimybės – nuo medicininio transporto iki planetų tyrinėjimų.

Robotas persijungia iš vairavimo į ėjimo būseną. Šaltinis.
Naujas navigacijos metodas, skirtas robotams, padedantiems žmonėms su regėjimo negalia
Kalbėdami apie judėjimą, Hamburgo taikomųjų mokslų universiteto mokslininkai pristatė naujovišką mobiliojo roboto pagalbos sistemos navigacijos algoritmą, pagrįstą OpenStreetMap duomenimis. Algoritmas sprendžia problemas, su kuriomis susiduria regėjimo negalią turintys asmenys, naršydami nepažįstamais maršrutais. Naudodamas trijų etapų procesą, apimantį žemėlapio patikrinimą, papildymą ir naršymo grafiko generavimą, algoritmas optimizuoja šios vartotojų grupės naršymą. Tyrime pabrėžiamas „OpenStreetMap“ duomenų potencialas gerinti regėjimo negalią turinčių asmenų navigacijos programas, turinčias įtakos robotikos sprendimų, galinčių patenkinti konkrečius vartotojų poreikius, pažangą, tikrinant ir papildant duomenis.

Ši autonominė transporto priemonė skirta padėti žmonėms su regėjimo negalia. Šaltinis.
Unikali technika pagerina roboto valdymą dinamiškoje aplinkoje
Lygiai taip pat, kaip ir naujos aplinkos, MIT ir Stanfordo universiteto mokslininkai sukūrė naują mašininio mokymosi techniką, kuri pagerina robotų, tokių kaip dronai ir autonominės transporto priemonės, valdymą greitai kintančioje aplinkoje. Šis metodas remiasi valdymo teorijos įžvalgomis, kad būtų sukurtos veiksmingos sudėtingos dinamikos valdymo strategijos, pvz., vėjo poveikis skraidančioms transporto priemonėms. Ši technika gali būti pritaikyta įvairiems tikslams: nuo autonominių transporto priemonių prisitaikymo prie slidaus kelio sąlygų iki bepiločių orlaivių veikimo gerinimo sudėtingomis vėjo sąlygomis. Integruojant išmoktą dinamiką ir į valdymą orientuotas struktūras, mokslininkų požiūris siūlo veiksmingesnį ir efektyvesnį robotų valdymo metodą, turintį įtakos įvairių tipų dinaminėms robotikos sistemoms.

Robotas, kuris galėjo pagerinti valdymą įvairiose aplinkose. Šaltinis.
Kasimo robotai su origami kojomis
Robotai jau kurį laiką tobulėjo virš žemės esančiose vietose, tačiau dabar jie tobulėja ir požeminėse erdvėse. Kalifornijos Berklio universiteto ir Kalifornijos Santa Kruzo universitetų mokslininkai pristatė naują robotikos metodą, kuris naudoja origami įkvėptas sulankstomas pėdas naršyti granuliuotai. aplinkos. Šis metodas, semdamasis įkvėpimo iš biologinių sistemų ir jų anizotropinių jėgų, panaudoja abipusio įkasimo metodus, kad būtų galima tiksliai judėti. Naudojant paprastas linijines pavaras ir panaudojant pasyvius anizotropinės jėgos atsakus, šis tyrimas atveria kelią supaprastintam robotų įkasimui, atskleidžiant supaprastinto, bet veiksmingo požeminio tyrinėjimo ir navigacijos perspektyvą. Šis naujoviškas origami principų integravimas į robotiką atveria duris patobulintoms požeminėms programoms.
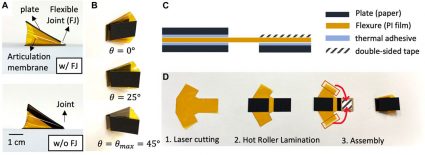
Pėdos prototipas ir jo gamybos būdas. Šaltinis.
Inovatyvūs procesai žemės ūkio robotikoje
Žemės ūkio pasaulyje mokslininkas iš Carnegie Mellon universiteto neseniai magistro darbe ištyrė mokslinio fenotipų nustatymo ir žemės ūkio robotikos sinergiją. Jų tyrime buvo gilinamasi į gyvybiškai svarbų tikslaus augalų savybių matavimo vaidmenį kuriant patobulintas augalų veisles, taip pat pabrėžiant perspektyvią robotų augalų manipuliavimo žemės ūkyje sritį. Numatydamas pažangias ūkininkavimo praktikas, mokslininkas pabrėžia tokias užduotis kaip genėjimas, apdulkinimas ir derliaus nuėmimas, kurį atlieka robotai. Siūlant naujoviškus metodus, tokius kaip 3D debesų vertinimas sėklų skaičiavimui ir vynmedžių segmentavimui, šiuo tyrimu siekiama supaprastinti žemės ūkio robotikos duomenų rinkimą. Be to, 3D skeleto vynmedžių modelių kūrimas ir naudojimas rodo potencialą optimizuoti vynuogių kokybę ir derlių, atveriant kelią efektyvesnei žemės ūkio praktikai.
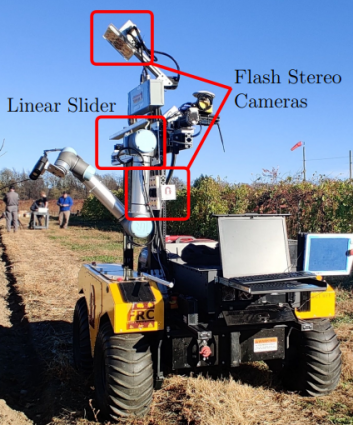
Buvo pristatyta robotų duomenų surinkimo platforma. Šaltinis.
Minkšti robotiniai kateteriai gali padėti pagerinti minimaliai invazinę chirurgiją
Perkeldami savo dėmesį į chirurgiją, Merilendo universiteto, Johnso Hopkinso universiteto ir Merilendo universiteto medicinos mokyklos mechanikos inžinierių ir medicinos tyrėjų komanda sukūrė pneumatiniu būdu valdomą minkštųjų robotų kateterio sistemą, kad pagerintų kontrolę minimaliai invazinių operacijų metu. Sistema leidžia chirurgams vienu metu labai tiksliai įterpti ir sulenkti kateterio antgalį, o tai gali pagerinti procedūrų, kurioms reikia naršyti siaurose ir sudėtingose kūno erdvėse, rezultatus. Tyrėjų požiūris supaprastina mechaninę ir valdymo architektūrą pneumatiniu paleidimu, leidžiančiu intuityviai valdyti lenkimą ir įdėjimą be rankinio kanalo slėgio. Sistema parodė daug žadą bandymų metu tiksliai pasiekti cilindrinius tikslus, o tai naudinga tiek pradedantiesiems, tiek patyrusiems chirurgams.
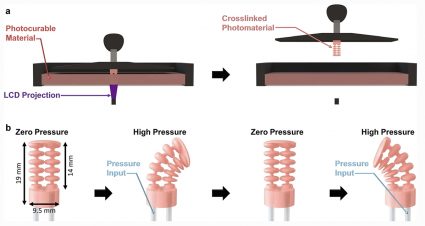
Paveikslėlyje parodyta minkšto roboto kateterio antgalio gamyba ir veikimas, naudojant spausdinimo procesą, skirtą pavarai ir pneumatinį slėgį kateterio lenkimui valdyti. Šaltinis.
Robotų sistema padidina paukštienos tvarkymo efektyvumą
Galiausiai, maisto pasaulyje, mokslininkai pristatė naujovišką robotų sistemą, skirtą efektyviai paimti ir sudėti deformuojamus paukštienos gabalus iš netvarkingų šiukšliadėžių. Architektūra integruoja kelis modulius, leidžiančius tiksliai manipuliuoti subtiliais paukštienos gaminiais. Siūlomas išsamus vertinimo metodas, skirtas įvertinti sistemos veikimą įvairiuose moduliuose, nušviečiant sėkmę ir iššūkius. Ši pažanga turi potencialą pakeisti mėsos perdirbimą ir platesnę maisto pramonę, tenkinant didesnio automatizavimo poreikius.
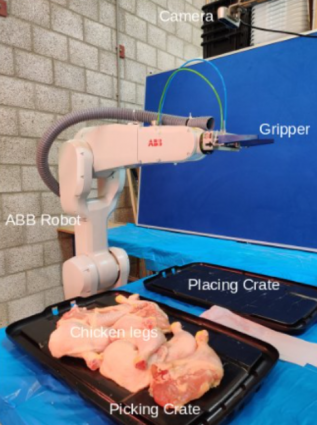
Eksperimentinė sąranka. Šaltinis.
Ši naujausių įvykių įvairovė, apimanti įvairias sritis, rodo įvairiapusį ir nuolat besikeičiantį robotikos technologijos pobūdį, atverdama naujus būdus jai integruoti įvairiuose sektoriuose. Nuolatinė robotikos raida rodo nuolatines pastangas ir galimas pasekmes, kurias ši pažanga gali turėti artimiausiais laikais.
Šaltiniai:
- Nauji biologiškai įkvėpti robotai skraido, rieda, eina ir dar daugiau. (2023 m. birželio 27 d.). Autonominių sistemų ir technologijų centras. Caltech universitetas.
- Kelio planavimo taikymas mobiliajai robotų pagalbos sistemai, pagrįstai „OpenStreetMap“ duomenimis. Stahr, P., Maaß, J. ir Gärtner, H. (2023). Robotika, 12(4), 113.
- Paprastesnis būdas išmokti valdyti robotą. (2023 m. liepos 26 d.). MIT naujienos | Masačusetso technologijos institutas.
- Efektyvus įkasimas atgal su anizotropinėmis origami pėdomis. Kim, S., Treers, LK, Huh, TM ir Stuart, HS (2023 m., liepos 3 d.). Sienos.
- Žemės ūkio robotikos fenotipų nustatymas ir skeletonizavimas. Robotikos institutas Carnegie Mellon universitete. (nd). Gauta 2023 m. rugpjūčio 10 d.
- Pneumatiškai valdomi minkšti robotiniai kateteriai užtikrina tikslumą ir lankstumą. (nd). Gauta 2023 m. rugpjūčio 10 d.
- Pažangi robotų sistema, skirta efektyviam deformuojančių naminių paukščių surinkimui ir įdėjimui netvarkingoje šiukšliadėžėje: visapusiškas vertinimo metodas. Raja, R., Burusa, AK, Kootstra, G., & van Henten, E. (2023, rugpjūčio 7 d.). TechRviv.

Shaunak Kapur yra Robohubo savanorių komandos dalis ir netrukus taps vyresniuoju vidurinėje mokykloje (Teksase). Shauną nuo mažens žavi robotika.
Shaunak Kapur yra Robohubo savanorių komandos dalis ir netrukus taps vyresniuoju vidurinėje mokykloje (Teksase). Shauną nuo mažens žavi robotika.

