Syl Kacapyr
Kornelio inžinieriai sukūrė robotų kolektyvą, kuris elgiasi mažiau kaip mašina, o labiau kaip medžiaga, kuri teka, formuojasi ir prisitaiko prie aplinkos be centralizuoto valdymo.
Sistema, vadinama Cross-Link Collective, susideda iš dešimčių mažų robotų, kurie atskirai juda ribotai, tačiau kartu demonstruoja koordinuotą ir nuolatinį judėjimą. Tyrimas, paskelbtas gegužės 20 d. Science Robotics, demonstruoja robotų sistemą, panašią į minkštąją medžiagą, kuri nuolat deformuojasi ir persitvarko judant, kurią skatina tai, ką mokslininkai vadina mechaniniu intelektu.
„Užuot pasikliaudama aiškiais skaičiavimais ir komunikacija, sistema perkelia intelektą į robotų formą ir jų fizinę sąveiką“, – sakė atitinkama autorė Kirstin Petersen, elektros ir kompiuterių inžinerijos docentė bei Aref ir Manon Lahham fakulteto bendradarbė Kornelio Duffieldo inžinerijos koledže. „Mes išnaudojame kontaktų dinamiką, kad atsirastų naudingas elgesys, todėl sistema natūraliai prisitaiko prie konfigūracijų, kurios sumažina vidinius įtempius ir pagerina judėjimą.
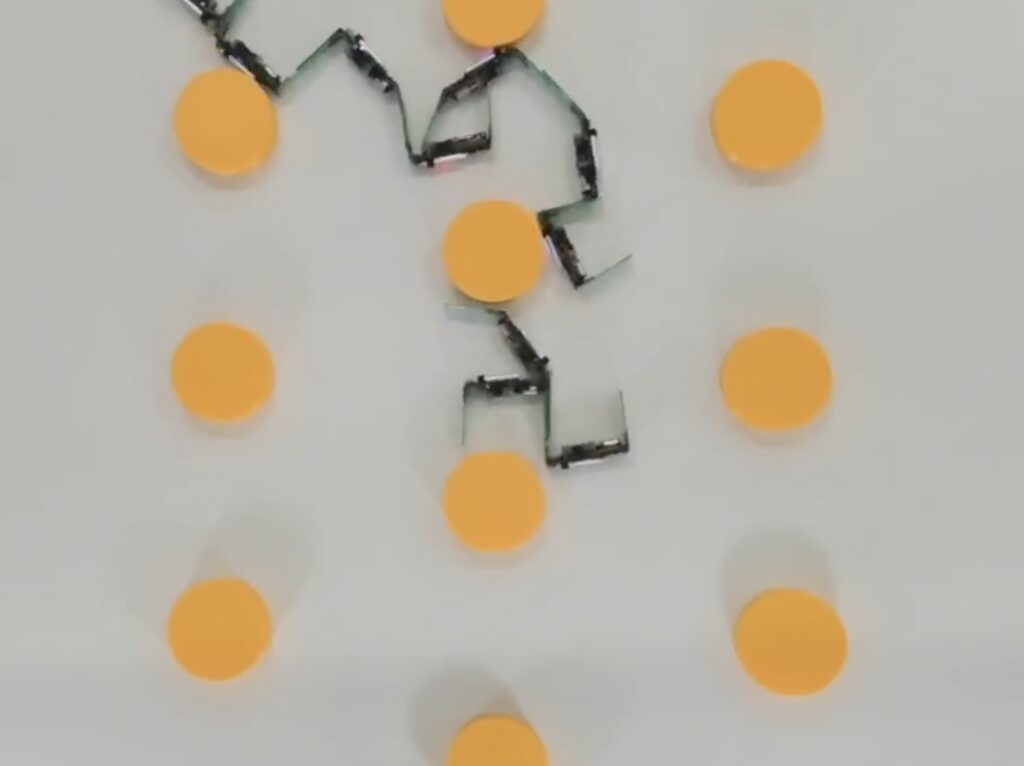
Kiekvienas robotas yra apie 200 milimetrų ilgio ir 20 milimetrų pločio, jame yra mažas variklis, kuris jį varo, kad svyruotų tarp dviejų formų – „I“ ir „U“. Šie svyravimai sukuria jėgas prieš žemę, todėl moduliai gali judėti į priekį ir stumdytis vienas į kitą. Kiekviename modulio gale yra silpni Velcro pleistrai, leidžiantys laikinai užsegti ir atsegti gretimus modulius.
Patys moduliai juda lėtai ir neefektyviai. Tačiau kai jie įsipainioja į grandines, jie pradeda judėti kolektyviai, savaime organizuodamiesi į besikeičiančias konfigūracijas, kurios yra atsparios sudėtingose aplinkose.
Ant nuožulnių paviršių robotų modulių grandinės judėjo patikimiau nei asmenys, kurie dažnai sustojo priklausomai nuo orientacijos. Kliūčių laukuose kolektyvas elgėsi kaip tekanti medžiaga, kurioje susiformavo jungtys, kad išlaikytų sanglaudą, o paskui nutrūkdavo, kad neužstrigtų.
„Nesvarbu, ar vieno modulio baterija yra pažeista, ar sugenda dėl kitų priežasčių“, – sakė vyriausioji autorė Danna Ma, kviestinė elektros ir kompiuterių inžinerijos dėstytoja. „Sistema išlieka funkcionali, nes gali prisitaikyti. Ji yra perteklinė ir nepriklauso nuo vieno modulio.”
Nepaisant minimalaus požiūrio, mokslininkai parodė, kad net nedidelis skaičiavimo kiekis gali pagerinti sistemos savybes. Siekdami sustiprinti sanglaudą, izoliuoti moduliai skleidžia garsinį nelaimės signalą, paskatindami netoliese esančius modulius sulėtinti greitį ir leisti iš naujo prisijungti.
„Nėra centralizuoto jutimo ar valdymo“, – sakė Ma. „Kiekvienas modulis gali nuspręsti, kada jis prarado ryšį su grupe pagal tai, kiek jis yra stumdomas, ir tada naudoti garsinį zvimbimą, kad sulėtintų netoliese esančius modulius, kol jis pasivys. Tai taip paprasta.”
Džordžijos technologijos instituto bendraautoriai sukūrė originalų modulio dizainą, kurį Petersenas ir Ma patobulino ilgus metus trukusių eksperimentų ir statistinės analizės, kad pagerintų jo gebėjimą įsipainioti ir veikti dideliais kiekiais. Šis procesas atskleidė, kaip net subtilūs modulio dydžio ir kitų charakteristikų pokyčiai gali turėti įtakos tam, kaip efektyviai jie prisijungia ir juda kaip grupė.
Cross-Link Collective įkvėpimo semiasi iš aktyvių gelių – medžiagų, kurių molekulinės jungtys nuolat formuojasi ir tirpsta, išlaikant bendrą struktūrą. Išvados galėtų padėti įkvėpti naujų minkštųjų medžiagų inžinerijos formų, nors mokslininkai dažniausiai šią sistemą laiko priemone tirti, kaip mechaninis intelektas gali sukelti atsparų, atsirandantį robotų kolektyvų elgesį.
„Mums naudinga pradėti galvoti apie tai, ką galime užkoduoti į pačios sistemos fiziką, nes robotai vis dažniau taikomi realaus pasaulio scenarijams, kurie yra labai nepatikimi ir dinamiški“, – sakė Petersenas. „Prieš intuityviai, atsisakydami tikslios konfigūracijų ir koordinavimo kontrolės, įgyjame stebėtinai daug naudingų elgsenų.
Kornelio universitetas


